|
| void | setup () override |
| |
| void | update () override |
| |
| void | dump_config () override |
| |
| void | calibrate_zero (uint16_t ppm) |
| |
| void | set_co2_sensor (sensor::Sensor *co2_sensor) |
| |
| | PollingComponent () |
| |
| | PollingComponent (uint32_t update_interval) |
| | Initialize this polling component with the given update interval in ms.
|
| |
| void | set_update_interval (uint32_t update_interval) |
| | Manually set the update interval in ms for this polling object.
|
| |
| void | call_setup () override |
| |
| virtual uint32_t | get_update_interval () const |
| | Get the update interval in ms of this sensor.
|
| |
| void | start_poller () |
| |
| void | stop_poller () |
| |
| virtual void | loop () |
| | This method will be called repeatedly.
|
| |
| virtual float | get_setup_priority () const |
| | priority of setup().
|
| |
| float | get_actual_setup_priority () const |
| |
| void | set_setup_priority (float priority) |
| |
| void | call () |
| |
| virtual void | on_shutdown () |
| |
| virtual void | on_safe_shutdown () |
| |
| virtual bool | teardown () |
| | Called during teardown to allow component to gracefully finish operations.
|
| |
| virtual void | on_powerdown () |
| | Called after teardown is complete to power down hardware.
|
| |
| uint8_t | get_component_state () const |
| |
| void | reset_to_construction_state () |
| | Reset this component back to the construction state to allow setup to run again.
|
| |
| bool | is_in_loop_state () const |
| | Check if this component has completed setup and is in the loop state.
|
| |
| bool | is_idle () const |
| | Check if this component is idle.
|
| |
| void | mark_failed () |
| | Mark this component as failed.
|
| |
| void | mark_failed (const LogString *message) |
| |
| void | disable_loop () |
| | Disable this component's loop.
|
| |
| void | enable_loop () |
| | Enable this component's loop.
|
| |
| void | enable_loop_soon_any_context () |
| | Thread and ISR-safe version of enable_loop() that can be called from any context.
|
| |
| bool | is_failed () const |
| |
| bool | is_ready () const |
| |
| virtual bool | can_proceed () |
| |
| bool | status_has_warning () const |
| |
| bool | status_has_error () const |
| |
| void | status_set_warning () |
| |
| void | status_set_warning (const char *message) |
| |
| void | status_set_warning (const LogString *message) |
| |
| void | status_set_error () |
| |
| void | status_set_error (const LogString *message) |
| |
| void | status_clear_warning () |
| |
| void | status_clear_error () |
| |
| void | status_momentary_warning (const char *name, uint32_t length=5000) |
| | Set warning status flag and automatically clear it after a timeout.
|
| |
| void | status_momentary_error (const char *name, uint32_t length=5000) |
| | Set error status flag and automatically clear it after a timeout.
|
| |
| bool | has_overridden_loop () const |
| |
| const LogString * | get_component_log_str () const ESPHOME_ALWAYS_INLINE |
| | Get the integration where this component was declared as a LogString for logging.
|
| |
| bool | should_warn_of_blocking (uint32_t blocking_time, uint32_t &threshold_ms_out) |
| |
| | UARTDevice ()=default |
| |
| | UARTDevice (UARTComponent *parent) |
| |
| void | set_uart_parent (UARTComponent *parent) |
| |
| void | write_byte (uint8_t data) |
| |
| void | set_rx_full_threshold (size_t rx_full_threshold) |
| |
| void | set_rx_full_threshold_ms (size_t time) |
| |
| size_t | get_rx_full_threshold () |
| |
| void | set_rx_timeout (size_t rx_timeout) |
| |
| size_t | get_rx_timeout () |
| |
| void | write_array (const uint8_t *data, size_t len) |
| |
| void | write_array (const std::vector< uint8_t > &data) |
| |
| template<size_t N> |
| void | write_array (const std::array< uint8_t, N > &data) |
| |
| void | write_str (const char *str) |
| |
| bool | read_byte (uint8_t *data) |
| |
| bool | peek_byte (uint8_t *data) |
| |
| bool | read_array (uint8_t *data, size_t len) |
| |
| template<size_t N> |
| optional< std::array< uint8_t, N > > | read_array () |
| |
| size_t | available () |
| |
| UARTFlushResult | flush () |
| |
| int | read () |
| |
| size_t | write (uint8_t data) |
| |
| int | peek () |
| |
| void | check_uart_settings (uint32_t baud_rate, uint8_t stop_bits=1, UARTParityOptions parity=UART_CONFIG_PARITY_NONE, uint8_t data_bits=8) |
| | Check that the configuration of the UART bus matches the provided values and otherwise print a warning.
|
| |
|
| bool | cm1106_write_command_ (const uint8_t *command, size_t command_len, uint8_t *response, size_t response_len) |
| |
| friend | void::setup () |
| |
| friend | void::original_setup () |
| |
| void | set_component_source_ (uint8_t index) |
| | Set where this component was loaded from for some debug messages.
|
| |
| void | call_dump_config_ () |
| |
| void | enable_loop_slow_path_ () |
| |
| void | set_component_state_ (uint8_t state) |
| | Helper to set component state (clears state bits and sets new state)
|
| |
| bool | set_status_flag_ (uint8_t flag) |
| | Helper to set a status LED flag on both this component and the app.
|
| |
| void | set_interval (uint32_t id, uint32_t interval, std::function< void()> &&f) |
| | Set an interval function with a numeric ID (zero heap allocation).
|
| |
| void | set_interval (InternalSchedulerID id, uint32_t interval, std::function< void()> &&f) |
| |
| void | set_interval (uint32_t interval, std::function< void()> &&f) |
| |
| bool | cancel_interval (uint32_t id) |
| |
| bool | cancel_interval (InternalSchedulerID id) |
| |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const char *name |
| |
| | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(uint32_t id |
| |
| | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(uint32_t initial_wait_time |
| |
| ESPDEPRECATED("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(const std | ESPDEPRECATED ("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(const char *name) |
| |
| | ESPDEPRECATED ("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(uint32_t id) |
| |
| void | set_timeout (uint32_t id, uint32_t timeout, std::function< void()> &&f) |
| | Set a timeout function with a numeric ID (zero heap allocation).
|
| |
| void | set_timeout (InternalSchedulerID id, uint32_t timeout, std::function< void()> &&f) |
| |
| void | set_timeout (uint32_t timeout, std::function< void()> &&f) |
| |
| bool | cancel_timeout (uint32_t id) |
| |
| bool | cancel_timeout (InternalSchedulerID id) |
| |
| void | defer (std::function< void()> &&f) |
| | Defer a callback to the next loop() call.
|
| |
| void | defer (uint32_t id, std::function< void()> &&f) |
| | Defer a callback with a numeric ID (zero heap allocation)
|
| |
| bool | cancel_defer (uint32_t id) |
| |
| void | status_clear_warning_slow_path_ () |
| |
| void | status_clear_error_slow_path_ () |
| |
|
| sensor::Sensor * | co2_sensor_ {nullptr} |
| |
| uint32_t | update_interval_ |
| |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") void set_interval(const std voi | set_interval )(const char *name, uint32_t interval, std::function< void()> &&f) |
| | Set an interval function with a unique name.
|
| |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") bool cancel_interval(const std boo | cancel_interval )(const char *name) |
| | Cancel an interval function.
|
| |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t | initial_wait_time |
| |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t uint8_t | max_attempts |
| |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t uint8_t std::function< RetryResult(uint8_t)> && | f |
| |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t uint8_t std::function< RetryResult(uint8_t)> float | backoff_increase_factor = 1.0f) |
| |
| uint32_t | initial_wait_time |
| |
| uint32_t uint8_t | max_attempts |
| |
| uint32_t uint8_t std::function< RetryResult(uint8_t)> && | f |
| |
| uint32_t uint8_t std::function< RetryResult(uint8_t)> float | backoff_increase_factor = 1.0f) |
| |
| uint8_t | max_attempts |
| |
| uint8_t std::function< RetryResult(uint8_t)> && | f |
| |
| uint8_t std::function< RetryResult(uint8_t)> float | backoff_increase_factor = 1.0f) |
| |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") void set_timeout(const std voi | set_timeout )(const char *name, uint32_t timeout, std::function< void()> &&f) |
| | Set a timeout function with a unique name.
|
| |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") bool cancel_timeout(const std boo | cancel_timeout )(const char *name) |
| | Cancel a timeout function.
|
| |
| ESPDEPRECATED("Use const char* overload instead. Removed in 2026.7.0", "2026.1.0") void defer(const std voi | defer )(const char *name, std::function< void()> &&f) |
| | Defer a callback to the next loop() call.
|
| |
| ESPDEPRECATED("Use const char* overload instead. Removed in 2026.7.0", "2026.1.0") bool cancel_defer(const std boo | cancel_defer )(const char *name) |
| | Cancel a defer callback using the specified name, name must not be empty.
|
| |
| uint8_t | component_source_index_ {0} |
| | Index into component source PROGMEM lookup table (0 = not set)
|
| |
| uint8_t | warn_if_blocking_over_ {WARN_IF_BLOCKING_OVER_CS} |
| | Warn threshold in centiseconds (max 2550ms)
|
| |
| uint8_t | component_state_ {0x00} |
| | State of this component - each bit has a purpose: Bits 0-2: Component state (0x00=CONSTRUCTION, 0x01=SETUP, 0x02=LOOP, 0x03=FAILED, 0x04=LOOP_DONE) Bit 3: STATUS_LED_WARNING Bit 4: STATUS_LED_ERROR Bit 5: Has overridden loop() (set at registration time) Bits 6-7: Unused - reserved for future expansion.
|
| |
| volatile bool | pending_enable_loop_ {false} |
| | ISR-safe flag for enable_loop_soon_any_context.
|
| |
| ComponentRuntimeStats | runtime_stats_ |
| |
| UARTComponent * | parent_ {nullptr} |
| |
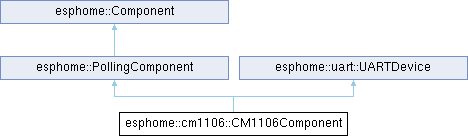
Definition at line 10 of file cm1106.h.
 Public Member Functions inherited from esphome::PollingComponent
Public Member Functions inherited from esphome::PollingComponent