Modbus controller class. More...
#include <modbus_controller.h>
Public Member Functions | |
| void | dump_config () override |
| void | loop () override |
| void | setup () override |
| void | update () override |
| void | queue_command (const ModbusCommandItem &command) |
| queues a modbus command in the send queue | |
| void | add_sensor_item (SensorItem *item) |
| Registers a sensor with the controller. Called by esphomes code generator. | |
| void | on_modbus_data (const std::vector< uint8_t > &data) override |
| called when a modbus response was parsed without errors | |
| void | on_modbus_error (uint8_t function_code, uint8_t exception_code) override |
| called when a modbus error response was received | |
| void | on_register_data (ModbusRegisterType register_type, uint16_t start_address, const std::vector< uint8_t > &data) |
| default delegate called by process_modbus_data when a response has retrieved from the incoming queue | |
| void | on_write_register_response (ModbusRegisterType register_type, uint16_t start_address, const std::vector< uint8_t > &data) |
| default delegate called by process_modbus_data when a response for a write response has retrieved from the incoming queue | |
| void | set_allow_duplicate_commands (bool allow_duplicate_commands) |
| Allow a duplicate command to be sent. | |
| bool | get_allow_duplicate_commands () |
| get if a duplicate command can be sent | |
| void | set_command_throttle (uint16_t command_throttle) |
| called by esphome generated code to set the command_throttle period | |
| void | set_offline_skip_updates (uint16_t offline_skip_updates) |
| called by esphome generated code to set the offline_skip_updates | |
| size_t | get_command_queue_length () |
| get the number of queued modbus commands (should be mostly empty) | |
| bool | get_module_offline () |
| get if the module is offline, didn't respond the last command | |
| template<typename F > | |
| void | add_on_command_sent_callback (F &&callback) |
| Set callback for commands. | |
| template<typename F > | |
| void | add_on_online_callback (F &&callback) |
| Set callback for online changes. | |
| template<typename F > | |
| void | add_on_offline_callback (F &&callback) |
| Set callback for offline changes. | |
| void | set_max_cmd_retries (uint8_t max_cmd_retries) |
| called by esphome generated code to set the max_cmd_retries. | |
| uint8_t | get_max_cmd_retries () |
| get how many times a command will be (re)sent if no response is received | |
 Public Member Functions inherited from esphome::PollingComponent Public Member Functions inherited from esphome::PollingComponent | |
| PollingComponent () | |
| PollingComponent (uint32_t update_interval) | |
| Initialize this polling component with the given update interval in ms. | |
| void | set_update_interval (uint32_t update_interval) |
| Manually set the update interval in ms for this polling object. | |
| void | call_setup () override |
| virtual uint32_t | get_update_interval () const |
| Get the update interval in ms of this sensor. | |
| void | start_poller () |
| void | stop_poller () |
| Public Member Functions inherited from esphome::Component | |
| virtual float | get_setup_priority () const |
| priority of setup(). | |
| float | get_actual_setup_priority () const |
| void | set_setup_priority (float priority) |
| void | call () |
| virtual void | on_shutdown () |
| virtual void | on_safe_shutdown () |
| virtual bool | teardown () |
| Called during teardown to allow component to gracefully finish operations. | |
| virtual void | on_powerdown () |
| Called after teardown is complete to power down hardware. | |
| uint8_t | get_component_state () const |
| void | reset_to_construction_state () |
| Reset this component back to the construction state to allow setup to run again. | |
| bool | is_in_loop_state () const |
| Check if this component has completed setup and is in the loop state. | |
| bool | is_idle () const |
| Check if this component is idle. | |
| void | mark_failed () |
| Mark this component as failed. | |
| void | mark_failed (const LogString *message) |
| void | disable_loop () |
| Disable this component's loop. | |
| void | enable_loop () |
| Enable this component's loop. | |
| void | enable_loop_soon_any_context () |
| Thread and ISR-safe version of enable_loop() that can be called from any context. | |
| bool | is_failed () const |
| bool | is_ready () const |
| virtual bool | can_proceed () |
| bool | status_has_warning () const |
| bool | status_has_error () const |
| void | status_set_warning () |
| void | status_set_warning (const char *message) |
| void | status_set_warning (const LogString *message) |
| void | status_set_error () |
| void | status_set_error (const LogString *message) |
| void | status_clear_warning () |
| void | status_clear_error () |
| void | status_momentary_warning (const char *name, uint32_t length=5000) |
| Set warning status flag and automatically clear it after a timeout. | |
| void | status_momentary_error (const char *name, uint32_t length=5000) |
| Set error status flag and automatically clear it after a timeout. | |
| bool | has_overridden_loop () const |
| const LogString * | get_component_log_str () const ESPHOME_ALWAYS_INLINE |
| Get the integration where this component was declared as a LogString for logging. | |
| bool | should_warn_of_blocking (uint32_t blocking_time, uint32_t &threshold_ms_out) |
| Public Member Functions inherited from esphome::modbus::ModbusDevice | |
| void | set_parent (Modbus *parent) |
| void | set_address (uint8_t address) |
| virtual void | on_modbus_read_registers (uint8_t function_code, uint16_t start_address, uint16_t number_of_registers) |
| virtual void | on_modbus_write_registers (uint8_t function_code, const std::vector< uint8_t > &data) |
| void | send (uint8_t function, uint16_t start_address, uint16_t number_of_entities, uint8_t payload_len=0, const uint8_t *payload=nullptr) |
| void | send_raw (const std::vector< uint8_t > &payload) |
| void | send_error (uint8_t function_code, ModbusExceptionCode exception_code) |
| ESPDEPRECATED ("Use ready_for_immediate_send() instead. Removed in 2026.9.0", "2026.3.0") bool waiting_for_response() | |
| bool | ready_for_immediate_send () |
Protected Member Functions | |
| size_t | create_register_ranges_ () |
| parse sensormap_ and create range of sequential addresses | |
| SensorSet | find_sensors_ (ModbusRegisterType register_type, uint16_t start_address) const |
| void | update_range_ (RegisterRange &r) |
| submit the read command for the address range to the send queue | |
| void | process_modbus_data_ (const ModbusCommandItem *response) |
| parse incoming modbus data | |
| bool | send_next_command_ () |
| send the next modbus command from the send queue | |
| void | dump_sensors_ () |
| dump the parsed sensormap for diagnostics | |
| Protected Member Functions inherited from esphome::Component | |
| friend | void::setup () |
| friend | void::original_setup () |
| void | set_component_source_ (uint8_t index) |
| Set where this component was loaded from for some debug messages. | |
| void | call_dump_config_ () |
| void | enable_loop_slow_path_ () |
| void | set_component_state_ (uint8_t state) |
| Helper to set component state (clears state bits and sets new state) | |
| bool | set_status_flag_ (uint8_t flag) |
| Helper to set a status LED flag on both this component and the app. | |
| void | set_interval (uint32_t id, uint32_t interval, std::function< void()> &&f) |
| Set an interval function with a numeric ID (zero heap allocation). | |
| void | set_interval (InternalSchedulerID id, uint32_t interval, std::function< void()> &&f) |
| void | set_interval (uint32_t interval, std::function< void()> &&f) |
| bool | cancel_interval (uint32_t id) |
| bool | cancel_interval (InternalSchedulerID id) |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const char *name |
| ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(uint32_t id | |
| ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(uint32_t initial_wait_time | |
| ESPDEPRECATED("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(const std | ESPDEPRECATED ("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(const char *name) |
| ESPDEPRECATED ("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(uint32_t id) | |
| void | set_timeout (uint32_t id, uint32_t timeout, std::function< void()> &&f) |
| Set a timeout function with a numeric ID (zero heap allocation). | |
| void | set_timeout (InternalSchedulerID id, uint32_t timeout, std::function< void()> &&f) |
| void | set_timeout (uint32_t timeout, std::function< void()> &&f) |
| bool | cancel_timeout (uint32_t id) |
| bool | cancel_timeout (InternalSchedulerID id) |
| void | defer (std::function< void()> &&f) |
| Defer a callback to the next loop() call. | |
| void | defer (uint32_t id, std::function< void()> &&f) |
| Defer a callback with a numeric ID (zero heap allocation) | |
| bool | cancel_defer (uint32_t id) |
| void | status_clear_warning_slow_path_ () |
| void | status_clear_error_slow_path_ () |
Protected Attributes | |
| SensorSet | sensorset_ |
| Collection of all sensors for this component. | |
| std::vector< RegisterRange > | register_ranges_ {} |
| Continuous range of modbus registers. | |
| std::list< std::unique_ptr< ModbusCommandItem > > | command_queue_ |
| Hold the pending requests to be sent. | |
| std::queue< std::unique_ptr< ModbusCommandItem > > | incoming_queue_ |
| modbus response data waiting to get processed | |
| bool | allow_duplicate_commands_ {false} |
| if duplicate commands can be sent | |
| uint32_t | last_command_timestamp_ {0} |
| when was the last send operation | |
| uint16_t | command_throttle_ {0} |
| min time in ms between sending modbus commands | |
| bool | module_offline_ {false} |
| if module didn't respond the last command | |
| uint16_t | offline_skip_updates_ {0} |
| how many updates to skip if module is offline | |
| uint8_t | max_cmd_retries_ {4} |
| How many times we will retry a command if we get no response. | |
| CallbackManager< void(int, int)> | command_sent_callback_ {} |
| Command sent callback. | |
| CallbackManager< void(int, int)> | online_callback_ {} |
| Server online callback. | |
| CallbackManager< void(int, int)> | offline_callback_ {} |
| Server offline callback. | |
| Protected Attributes inherited from esphome::PollingComponent | |
| uint32_t | update_interval_ |
| Protected Attributes inherited from esphome::Component | |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") void set_interval(const std voi | set_interval )(const char *name, uint32_t interval, std::function< void()> &&f) |
| Set an interval function with a unique name. | |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") bool cancel_interval(const std boo | cancel_interval )(const char *name) |
| Cancel an interval function. | |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t | initial_wait_time |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t uint8_t | max_attempts |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t uint8_t std::function< RetryResult(uint8_t)> && | f |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std uint32_t uint8_t std::function< RetryResult(uint8_t)> float | backoff_increase_factor = 1.0f) |
| uint32_t | initial_wait_time |
| uint32_t uint8_t | max_attempts |
| uint32_t uint8_t std::function< RetryResult(uint8_t)> && | f |
| uint32_t uint8_t std::function< RetryResult(uint8_t)> float | backoff_increase_factor = 1.0f) |
| uint8_t | max_attempts |
| uint8_t std::function< RetryResult(uint8_t)> && | f |
| uint8_t std::function< RetryResult(uint8_t)> float | backoff_increase_factor = 1.0f) |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") void set_timeout(const std voi | set_timeout )(const char *name, uint32_t timeout, std::function< void()> &&f) |
| Set a timeout function with a unique name. | |
| ESPDEPRECATED("Use const char* or uint32_t overload instead. Removed in 2026.7.0", "2026.1.0") bool cancel_timeout(const std boo | cancel_timeout )(const char *name) |
| Cancel a timeout function. | |
| ESPDEPRECATED("Use const char* overload instead. Removed in 2026.7.0", "2026.1.0") void defer(const std voi | defer )(const char *name, std::function< void()> &&f) |
| Defer a callback to the next loop() call. | |
| ESPDEPRECATED("Use const char* overload instead. Removed in 2026.7.0", "2026.1.0") bool cancel_defer(const std boo | cancel_defer )(const char *name) |
| Cancel a defer callback using the specified name, name must not be empty. | |
| uint8_t | component_source_index_ {0} |
| Index into component source PROGMEM lookup table (0 = not set) | |
| uint8_t | warn_if_blocking_over_ {WARN_IF_BLOCKING_OVER_CS} |
| Warn threshold in centiseconds (max 2550ms) | |
| uint8_t | component_state_ {0x00} |
| State of this component - each bit has a purpose: Bits 0-2: Component state (0x00=CONSTRUCTION, 0x01=SETUP, 0x02=LOOP, 0x03=FAILED, 0x04=LOOP_DONE) Bit 3: STATUS_LED_WARNING Bit 4: STATUS_LED_ERROR Bit 5: Has overridden loop() (set at registration time) Bits 6-7: Unused - reserved for future expansion. | |
| volatile bool | pending_enable_loop_ {false} |
| ISR-safe flag for enable_loop_soon_any_context. | |
| ComponentRuntimeStats | runtime_stats_ |
| Protected Attributes inherited from esphome::modbus::ModbusDevice | |
| friend | Modbus |
| Modbus * | parent_ |
| uint8_t | address_ |
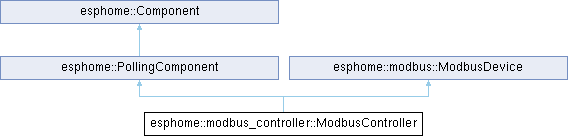
Detailed Description
Modbus controller class.
Each instance handles the modbus commuinication for all sensors with the same modbus address
all sensor items (sensors, switches, binarysensor ...) are parsed in modbus address ranges. when esphome calls ModbusController::Update the commands for each range are created and sent Responses for the commands are dispatched to the modbus sensor items.
Definition at line 282 of file modbus_controller.h.
Member Function Documentation
◆ add_on_command_sent_callback()
|
inline |
Set callback for commands.
Definition at line 318 of file modbus_controller.h.
◆ add_on_offline_callback()
|
inline |
Set callback for offline changes.
Definition at line 326 of file modbus_controller.h.
◆ add_on_online_callback()
|
inline |
Set callback for online changes.
Definition at line 322 of file modbus_controller.h.
◆ add_sensor_item()
|
inline |
Registers a sensor with the controller. Called by esphomes code generator.
Definition at line 292 of file modbus_controller.h.
◆ create_register_ranges_()
|
protected |
parse sensormap_ and create range of sequential addresses
Definition at line 202 of file modbus_controller.cpp.
◆ dump_config()
|
overridevirtual |
Reimplemented from esphome::Component.
Definition at line 308 of file modbus_controller.cpp.
◆ dump_sensors_()
|
protected |
dump the parsed sensormap for diagnostics
Definition at line 351 of file modbus_controller.cpp.
◆ find_sensors_()
|
protected |
Definition at line 114 of file modbus_controller.cpp.
◆ get_allow_duplicate_commands()
|
inline |
get if a duplicate command can be sent
Definition at line 308 of file modbus_controller.h.
◆ get_command_queue_length()
|
inline |
get the number of queued modbus commands (should be mostly empty)
Definition at line 314 of file modbus_controller.h.
◆ get_max_cmd_retries()
|
inline |
get how many times a command will be (re)sent if no response is received
Definition at line 332 of file modbus_controller.h.
◆ get_module_offline()
|
inline |
get if the module is offline, didn't respond the last command
Definition at line 316 of file modbus_controller.h.
◆ loop()
|
overridevirtual |
Reimplemented from esphome::Component.
Definition at line 331 of file modbus_controller.cpp.
◆ on_modbus_data()
|
overridevirtual |
called when a modbus response was parsed without errors
Implements esphome::modbus::ModbusDevice.
Definition at line 60 of file modbus_controller.cpp.
◆ on_modbus_error()
|
overridevirtual |
called when a modbus error response was received
Reimplemented from esphome::modbus::ModbusDevice.
Definition at line 96 of file modbus_controller.cpp.
◆ on_register_data()
| void esphome::modbus_controller::ModbusController::on_register_data | ( | ModbusRegisterType | register_type, |
| uint16_t | start_address, | ||
| const std::vector< uint8_t > & | data ) |
default delegate called by process_modbus_data when a response has retrieved from the incoming queue
Definition at line 128 of file modbus_controller.cpp.
◆ on_write_register_response()
| void esphome::modbus_controller::ModbusController::on_write_register_response | ( | ModbusRegisterType | register_type, |
| uint16_t | start_address, | ||
| const std::vector< uint8_t > & | data ) |
default delegate called by process_modbus_data when a response for a write response has retrieved from the incoming queue
Definition at line 345 of file modbus_controller.cpp.
◆ process_modbus_data_()
|
protected |
parse incoming modbus data
Definition at line 90 of file modbus_controller.cpp.
◆ queue_command()
| void esphome::modbus_controller::ModbusController::queue_command | ( | const ModbusCommandItem & | command | ) |
queues a modbus command in the send queue
Definition at line 139 of file modbus_controller.cpp.
◆ send_next_command_()
|
protected |
send the next modbus command from the send queue
Definition at line 17 of file modbus_controller.cpp.
◆ set_allow_duplicate_commands()
|
inline |
Allow a duplicate command to be sent.
Definition at line 304 of file modbus_controller.h.
◆ set_command_throttle()
|
inline |
called by esphome generated code to set the command_throttle period
Definition at line 310 of file modbus_controller.h.
◆ set_max_cmd_retries()
|
inline |
called by esphome generated code to set the max_cmd_retries.
Definition at line 330 of file modbus_controller.h.
◆ set_offline_skip_updates()
|
inline |
called by esphome generated code to set the offline_skip_updates
Definition at line 312 of file modbus_controller.h.
◆ setup()
|
overridevirtual |
Reimplemented from esphome::Component.
Definition at line 9 of file modbus_controller.cpp.
◆ update()
|
overridevirtual |
Implements esphome::PollingComponent.
Definition at line 188 of file modbus_controller.cpp.
◆ update_range_()
|
protected |
submit the read command for the address range to the send queue
Definition at line 157 of file modbus_controller.cpp.
Field Documentation
◆ allow_duplicate_commands_
|
protected |
if duplicate commands can be sent
Definition at line 356 of file modbus_controller.h.
◆ command_queue_
|
protected |
Hold the pending requests to be sent.
Definition at line 352 of file modbus_controller.h.
◆ command_sent_callback_
|
protected |
Command sent callback.
Definition at line 368 of file modbus_controller.h.
◆ command_throttle_
|
protected |
min time in ms between sending modbus commands
Definition at line 360 of file modbus_controller.h.
◆ incoming_queue_
|
protected |
modbus response data waiting to get processed
Definition at line 354 of file modbus_controller.h.
◆ last_command_timestamp_
|
protected |
when was the last send operation
Definition at line 358 of file modbus_controller.h.
◆ max_cmd_retries_
|
protected |
How many times we will retry a command if we get no response.
Definition at line 366 of file modbus_controller.h.
◆ module_offline_
|
protected |
if module didn't respond the last command
Definition at line 362 of file modbus_controller.h.
◆ offline_callback_
|
protected |
Server offline callback.
Definition at line 372 of file modbus_controller.h.
◆ offline_skip_updates_
|
protected |
how many updates to skip if module is offline
Definition at line 364 of file modbus_controller.h.
◆ online_callback_
|
protected |
Server online callback.
Definition at line 370 of file modbus_controller.h.
◆ register_ranges_
|
protected |
Continuous range of modbus registers.
Definition at line 350 of file modbus_controller.h.
◆ sensorset_
|
protected |
Collection of all sensors for this component.
Definition at line 348 of file modbus_controller.h.
The documentation for this class was generated from the following files:
- esphome/components/modbus_controller/modbus_controller.h
- esphome/components/modbus_controller/modbus_controller.cpp
Generated by