|
| void | setup () override |
| |
| void | dump_config () override |
| |
| float | get_setup_priority () const override |
| |
| void | set_accel_range (LSM6DSAccelRange r) |
| |
| void | set_accel_odr (LSM6DSAccelODR o) |
| |
| void | set_gyro_range (LSM6DSGyroRange r) |
| |
| void | set_gyro_odr (LSM6DSGyroODR o) |
| |
| template<typename F > |
| void | add_temperature_listener (F &&cb) |
| |
| void | setup () override |
| |
| void | update () override |
| |
| void | dump_config () override |
| |
| float | get_setup_priority () const override |
| |
| void | set_matrix (const std::array< float, 9 > &m) |
| |
| void | set_calibration_key (uint32_t key) |
| |
| bool | calibrate_level () |
| | Calibrate the matrix so the current reading maps to [0, 0, 1] (device flat).
|
| |
| bool | calibrate_heading () |
| | Assuming Y-axis rotation only, correct the heading so X/Y align correctly.
|
| |
| bool | save_calibration () |
| | Save the current matrix to NVS.
|
| |
| void | clear_calibration () |
| | Restore the build-time (axis_map / transform_matrix) base, discarding calibration.
|
| |
| template<typename F > |
| void | add_listener (F &&cb) |
| |
| | PollingComponent () |
| |
| | PollingComponent (uint32_t update_interval) |
| | Initialize this polling component with the given update interval in ms.
|
| |
| void | set_update_interval (uint32_t update_interval) |
| | Manually set the update interval in ms for this polling object.
|
| |
| void | call_setup () override |
| |
| virtual uint32_t | get_update_interval () const |
| | Get the update interval in ms of this sensor.
|
| |
| void | start_poller () |
| |
| void | stop_poller () |
| |
| virtual void | loop () |
| | This method will be called repeatedly.
|
| |
| float | get_actual_setup_priority () const |
| |
| void | set_setup_priority (float priority) |
| |
| void | call () |
| |
| virtual void | on_shutdown () |
| |
| virtual void | on_safe_shutdown () |
| |
| virtual bool | teardown () |
| | Called during teardown to allow component to gracefully finish operations.
|
| |
| virtual void | on_powerdown () |
| | Called after teardown is complete to power down hardware.
|
| |
| uint8_t | get_component_state () const |
| |
| void | reset_to_construction_state () |
| | Reset this component back to the construction state to allow setup to run again.
|
| |
| bool | is_in_loop_state () const |
| | Check if this component has completed setup and is in the loop state.
|
| |
| bool | is_idle () const |
| | Check if this component is idle.
|
| |
| void | mark_failed () |
| | Mark this component as failed.
|
| |
| void | mark_failed (const LogString *message) |
| |
| void | disable_loop () |
| | Disable this component's loop.
|
| |
| void | enable_loop () |
| | Enable this component's loop.
|
| |
| void | enable_loop_soon_any_context () |
| | Thread and ISR-safe version of enable_loop() that can be called from any context.
|
| |
| bool | is_failed () const |
| |
| bool | is_ready () const |
| |
| virtual bool | can_proceed () |
| |
| bool | status_has_warning () const |
| |
| bool | status_has_error () const |
| |
| void | status_set_warning () |
| |
| void | status_set_warning (const char *message) |
| |
| void | status_set_warning (const LogString *message) |
| |
| void | status_set_error () |
| |
| void | status_set_error (const LogString *message) |
| |
| void | status_clear_warning () |
| |
| void | status_clear_error () |
| |
| void | status_momentary_warning (const char *name, uint32_t length=5000) |
| | Set warning status flag and automatically clear it after a timeout.
|
| |
| void | status_momentary_error (const char *name, uint32_t length=5000) |
| | Set error status flag and automatically clear it after a timeout.
|
| |
| bool | has_overridden_loop () const |
| |
| const LogString * | get_component_log_str () const ESPHOME_ALWAYS_INLINE |
| | Get the integration where this component was declared as a LogString for logging.
|
| |
| bool | should_warn_of_blocking (uint32_t blocking_time, uint32_t &threshold_ms_out) |
| |
| | I2CDevice ()=default |
| | we use the C++ default constructor
|
| |
| void | set_i2c_address (uint8_t address) |
| | We store the address of the device on the bus.
|
| |
| uint8_t | get_i2c_address () const |
| | Returns the I2C address of the object.
|
| |
| void | set_i2c_bus (I2CBus *bus) |
| | we store the pointer to the I2CBus to use
|
| |
| I2CRegister | reg (uint8_t a_register) |
| | calls the I2CRegister constructor
|
| |
| I2CRegister16 | reg16 (uint16_t a_register) |
| | calls the I2CRegister16 constructor
|
| |
| ErrorCode | read (uint8_t *data, size_t len) const |
| | reads an array of bytes from the device using an I2CBus
|
| |
| ErrorCode | read_register (uint8_t a_register, uint8_t *data, size_t len) |
| | reads an array of bytes from a specific register in the I²C device
|
| |
| ErrorCode | read_register16 (uint16_t a_register, uint8_t *data, size_t len) |
| | reads an array of bytes from a specific register in the I²C device
|
| |
| ErrorCode | write (const uint8_t *data, size_t len) const |
| | writes an array of bytes to a device using an I2CBus
|
| |
| ErrorCode | write_read (const uint8_t *write_data, size_t write_len, uint8_t *read_data, size_t read_len) const |
| | writes an array of bytes to a device, then reads an array, as a single transaction
|
| |
| ErrorCode | write_register (uint8_t a_register, const uint8_t *data, size_t len) const |
| | writes an array of bytes to a specific register in the I²C device
|
| |
| ErrorCode | write_register16 (uint16_t a_register, const uint8_t *data, size_t len) const |
| | write an array of bytes to a specific register in the I²C device
|
| |
| bool | read_bytes (uint8_t a_register, uint8_t *data, uint8_t len) |
| | Compat APIs All methods below have been added for compatibility reasons.
|
| |
| bool | read_bytes_raw (uint8_t *data, uint8_t len) const |
| |
| template<size_t N> |
| optional< std::array< uint8_t, N > > | read_bytes (uint8_t a_register) |
| |
| template<size_t N> |
| optional< std::array< uint8_t, N > > | read_bytes_raw () |
| |
| bool | read_bytes_16 (uint8_t a_register, uint16_t *data, uint8_t len) |
| |
| bool | read_byte (uint8_t a_register, uint8_t *data) |
| |
| optional< uint8_t > | read_byte (uint8_t a_register) |
| |
| bool | read_byte_16 (uint8_t a_register, uint16_t *data) |
| |
| bool | write_bytes (uint8_t a_register, const uint8_t *data, uint8_t len) const |
| |
| bool | write_bytes (uint8_t a_register, const std::vector< uint8_t > &data) const |
| |
| template<size_t N> |
| bool | write_bytes (uint8_t a_register, const std::array< uint8_t, N > &data) |
| |
| bool | write_bytes_16 (uint8_t a_register, const uint16_t *data, uint8_t len) const |
| |
| bool | write_byte (uint8_t a_register, uint8_t data) const |
| |
| bool | write_byte_16 (uint8_t a_register, uint16_t data) const |
| |
|
| bool | update_data (motion::MotionData &data) override |
| |
| void | map_axes_ (float output[3], const float input[3]) const |
| |
| friend | void::setup () |
| |
| friend | void::original_setup () |
| |
| void | set_component_source_ (uint8_t index) |
| | Set where this component was loaded from for some debug messages.
|
| |
| void | call_dump_config_ () |
| |
| void | enable_loop_slow_path_ () |
| |
| void | set_component_state_ (uint8_t state) |
| | Helper to set component state (clears state bits and sets new state)
|
| |
| bool | set_status_flag_ (uint8_t flag) |
| | Helper to set a status LED flag on both this component and the app.
|
| |
| void | set_interval (const char *name, uint32_t interval, std::function< void()> &&f) |
| | Set an interval function with a const char* name.
|
| |
| void | set_interval (uint32_t id, uint32_t interval, std::function< void()> &&f) |
| | Set an interval function with a numeric ID (zero heap allocation).
|
| |
| void | set_interval (InternalSchedulerID id, uint32_t interval, std::function< void()> &&f) |
| |
| void | set_interval (uint32_t interval, std::function< void()> &&f) |
| |
| bool | cancel_interval (const char *name) |
| | Cancel an interval function.
|
| |
| bool | cancel_interval (uint32_t id) |
| |
| bool | cancel_interval (InternalSchedulerID id) |
| |
| ESPDEPRECATED("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const std | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(const char *name |
| |
| | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(uint32_t id |
| |
| | ESPDEPRECATED ("set_retry is deprecated and will be removed in 2026.8.0. Use set_timeout or set_interval instead.", "2026.2.0") void set_retry(uint32_t initial_wait_time |
| |
| ESPDEPRECATED("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(const std | ESPDEPRECATED ("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(const char *name) |
| |
| | ESPDEPRECATED ("cancel_retry is deprecated and will be removed in 2026.8.0.", "2026.2.0") bool cancel_retry(uint32_t id) |
| |
| void | set_timeout (const char *name, uint32_t timeout, std::function< void()> &&f) |
| | Set a timeout function with a const char* name.
|
| |
| void | set_timeout (uint32_t id, uint32_t timeout, std::function< void()> &&f) |
| | Set a timeout function with a numeric ID (zero heap allocation).
|
| |
| void | set_timeout (InternalSchedulerID id, uint32_t timeout, std::function< void()> &&f) |
| |
| void | set_timeout (uint32_t timeout, std::function< void()> &&f) |
| |
| bool | cancel_timeout (const char *name) |
| | Cancel a timeout function.
|
| |
| bool | cancel_timeout (uint32_t id) |
| |
| bool | cancel_timeout (InternalSchedulerID id) |
| |
| void | defer (const char *name, std::function< void()> &&f) |
| | Defer a callback to the next loop() call with a const char* name.
|
| |
| void | defer (std::function< void()> &&f) |
| | Defer a callback to the next loop() call.
|
| |
| void | defer (uint32_t id, std::function< void()> &&f) |
| | Defer a callback with a numeric ID (zero heap allocation)
|
| |
| bool | cancel_defer (const char *name) |
| | Cancel a defer callback using the specified name, name must not be empty.
|
| |
| bool | cancel_defer (uint32_t id) |
| |
| void | status_clear_warning_slow_path_ () |
| |
| void | status_clear_error_slow_path_ () |
| |
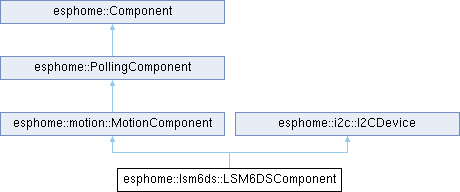
Definition at line 85 of file lsm6ds.h.
 Public Member Functions inherited from esphome::motion::MotionComponent
Public Member Functions inherited from esphome::motion::MotionComponent